
Hexapod, 6-Axis Parallel Kinematics Positioning System, Stewart Platform, Six-Axis Actuator, 6DOF Motion Platform Positioner, by PI USA. Infinity Hobby. Introduction The new high performance precision gimbal stabilization system ZYX-GS from Tarot provides dedicated independent gimbal control to efficiently and effectively stabilize your AP/AV shots and ideally matched to our new PTZ gimbal and other 3rd party gimbal providers.

The ZYX-GS features 3-axis stabilization, adjustable gains (PC), attitude locking and attitude following modes, 3-axis MEMS gyro and accelerometer, free firmware upgrade services. Offering a wide range of servo support and an unbeatable price point, Tarot hopes to continue its trend of supplying quality products to the Heli and Multi-rotor markets at the lowest possible price. ZYX-GS provides two kinds of stabilization control mode, which are attitude locking mode and following (FPV) mode. These make the users’ aerial filming applications more flexible and convenient. FPV Hobby - SUB-NANO Combo set. FPV Hobby - RTF 5.8GHz + 1 gram Camera Combo set-2. Oculus Rift - Virtual Reality Headset for 3D Gaming. A Simple Quaternion-based Camera - Math and Physics. I looked through a thousand web pages for a good quaternion camera tutorial, and I could not find one.
There is a good example on gametutorials.com that uses quaternions, but it uses them to rotate general objects and makes things a little more difficult than they actually need to be to use quaternions to make a camera. Therefore, in this article I am going to present a simple quaternion-based camera that can be used to rotate the view of your camera using the mouse. So, what is a Quaternion? Quaternions aren't actually as scary as they sound. Everything I read regarding quaternions talked about imaginary numbers, hyper-complex numbers, spinors, and other scary sounding things.
Q = xi + yj + zk + w where i,j & k are coordinate basis vectors for three dimensions. I don't particularly like this representation for computer graphics, especially where cameras are concerned. Language agnostic - Is there an algorithm for converting quaternion rotations to Euler angle rotations. Euler angles from matrix - CGAFaq. From CGAFaq As discussed in the article on Euler angles, a triple of angles can represent a 3D rotation as a composition of coordinate axis-aligned rotations in 24 different ways. xyzs, xyxs, xzys, xzxs, yzxs, yzys, yxzs, yxys, zxys, zxzs, zyxs, zyzs xyzr, xyxr, xzyr, xzxr, yzxr, yzyr, yxzr, yxyr, zxyr, zxzr, zyxr, zyzr This would seem to require either choosing one convention only, or writing separate code for each of the special cases.
Neither choice is very appealing, and neither is necessary. One caution: Extraction differs critically from generation in that, while a triple of angles generates a unique rotation matrix for a given system, extraction of angles suffers from three kinds of ambiguity no matter which system is used. 3-Axis Aluminum Brushless Camera Mount Gimbal w/ Motor & Controller for Gopro3 DJI FPV $180.00 Free Shipping. Conversion Quaternion to Euler. Equations heading = atan2(2*qy*qw-2*qx*qz , 1 - 2*qy2 - 2*qz2) attitude = asin(2*qx*qy + 2*qz*qw) bank = atan2(2*qx*qw-2*qy*qz , 1 - 2*qx2 - 2*qz2) except when qx*qy + qz*qw = 0.5 (north pole) which gives: heading = 2 * atan2(x,w) bank = 0 and when qx*qy + qz*qw = -0.5 (south pole) which gives: heading = -2 * atan2(x,w) bank = 0 Issues It is better to use atan2 function than atan function as described here.
Note the warning on this page about the order of operands. The trig functions are many to one, therefore the inverse trig functions have many possible results. This is what the java Math functions return for instance. If you have a different result from that shown on this page it may be that you are using different standards, I have tried to keep the standards consistent across this site and I have tried to define the standards that I am using here. However if you have checked these things and you still have a discrepancy then I have probably made an error so please let me know here.
Quaternion to Euler Examples 90 degree steps. In order to check we are getting the correct result this page starts with a euler angle, converts it to a quaternion, then converts it back to to euler angle.
When we have done the complete rond trip we end up with the same angles which gives confidence that the method is correct. So lets start with the following euler angle: heading = 10 degrees attitude = 20 degrees bank = 30 degrees We then convert to quaternion using the first method on this page. Note that most maths libraries use radians so you will probably need to convert degrees to radians by multiplying by PI/180 = 0.01745. Camera control and stabilisation via PC. Martinezcontroller - brushless-gimbal - Brushless Gimbal Controller. This controller was designed by "Martinez" of FPV-Comunity.de with the help of others.
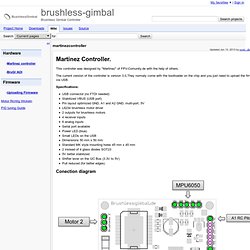
The current version of the controller is version 3.0,They normaly come with the bootloader on the chip and you just need to upload the firmware via USB. Specifications: Martinez board / Open source brushless gimbal HELP THREAD. Hi folks, since people are starting to flood the Open Source Brushless Gimbal thread with questions that have been answered in it noumerous times, I feel setting up a thread with solutions is necessary.
You can safely connect 2S, 3S and 4S batteries to the board. Hardware: When you connect your board (on WINDOWS) the OS will automatically install a FTDI-UART device which is using a COM port. Make sure this COM port has a port number lower than 10, because otherwise the tweaking tool may not be able to access it. Check your IMU (small gyro board) for proper orientation. If the software version on the controller board is lower than V49A_r161, the components (chips) on it must face DOWN. Edit: As of V49A_r161 the devs have solidly implemented the ability to define the IMU/sensor board orientation in the controller software according to several user reports. Flashing Firmware You need the Arduino software to write the FW to the EEPROM of the board: EvvGC 3/2axis Brushless Gimbal Controller (Open Source)EWGC-3. EvvGC 3/2axis Brushless Gimbal Controller (Open Source) Build Log.

3 axis brushless gimbal. The key is a 2nd IMU for the yaw motor.

Basically, the roll & yaw motors trade places as IMU2 pitch goes from 0 to 90. The PID equations have a set of gains for the upright position & a set of gains for the swapped position. The PID equations for the motors are always solved for fully upright & fully swapped. The PID outputs are then blended based on the actual IMU2 state. The gradient isn't linear. The yaw motor output fades to 0 as IMU2 roll goes from 0 to 90.
The algorithm worked as described. Both IMU's required heavy, shielded cable. After fighting I2C glitches forever, remembering a Logitec webcam was connected to both ends of the shield, decided to solder both ends of the shield. The forums & the experience of tuning the gimbal showed there is a limit to the amount of motion it can isolate. The gimbal has 1150hz feedback & a sin table with 1024 steps. The controller applies a constant current to the motor, regardless of the amount of motion. Catalogo prodotti. DYS Brushless Three-axis Gimbal Kit w/4108 Motors for Sony NEX ILDC Camera Aerial Photography $204.92 Free Shipping. BG20 GoPro Gimbal with Control Board - Gimbal. Brushless Gimbal Controller and Parts. DIY Brushless Gimbal For GoPro & Nex5.
One side of the propeller saver adapter is 5mm (caming with motors package) this parts fit in the second aluminium parts left side (camera container parts) when the aluminium parts drilled 5mm.
I used epoxy glue before before settling firmly.