
German Robot Learns How to Play Ping-Pong. Unlike in Hollywood Sci-Fi thrillers, humans and robots have only really battled in games like chess and Jeopardy.
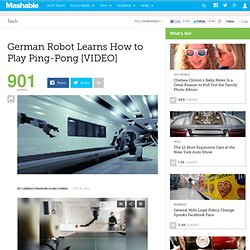
Now the struggle moves to the Ping-Pong table. Researchers have taught a robot how to play table tennis, proving once again that robots may be able to learn how to imitate humans by observing them perform actions and then mimicking them. Katharina Muelling and other scientists at the Technical University of Darmstadt in Germany mounted a robotic arm equipped with a camera to the ceiling. Then, to train it, Muelling guided the arm through a series of shots. After some practice, the robot was left on its own to play against a human player and, after the training, it was able to improvise, learning on the fly how to counter shots it hadn't seen before. SEE ALSO: Watch This Human-Like Robot Endure Crazy Obstacles After an hour without any help, the robot was able to return 88% of the shots.
Watch the video above to learn more about this amazing robot. A robot that plays table tennis like humans. Researchers have developed a robot that learns to play ping-pong from humans and improves as it competes against them.

Katharina Muelling and colleagues at the Technical University of Darmstadt in Germany suspended a robotic arm from the ceiling and equipped it with a camera that watches the playing area. The arm was physically guided by Muelling through different shots to return incoming balls. The arm was then left to draw on its training to return balls hit by a human opponent, New Scientist reported. When the ball was in a position it had not seen before, the arm used its library of shots to improvise new ones. After an hour of unassisted practise, the system successfully returned 88 per cent of shots.
Other robots have played table tennis in the past, but none have used human demonstration to learn the game. German Robot Learns Ping-Pong from People - Tech Europe. By Nick Clayton Agence France-Presse/Getty Images How long before robots can take on Olympic players like China’s Ding Ning?

It is over 15 years since IBMIBM -3.25% supercomputer Big Blue defeated world chess champion Garry Kasparov. (Although the victory might have been caused by a bug which made the computer seem more sophisticated than it was, according to Wired.) Now a robot is learning to be able to take on the world at table tennis. New Scientist reports: Katharina Muelling and colleagues at the Technical University of Darmstadt in Germany suspended a robotic arm from the ceiling and equipped it with a camera that watches the playing area. There have, apparently, been other ping-pong playing robots before, but this is the first to learn from human demonstration. Wired: Did Deep Blue beat Kasparov because of a computer bug? Ping-pong robot learns to play like a person - tech - 27 October 2012. Katharina Muelling - Member - Intelligent Autonomous Systems - Informatik - TU Darmstadt. Katharina Muelling joined the Max-Planck Institute for Biological Cybernetics in 2007 as an undergraduate student in the Empirical Inference Department, supervised by Jan Peters.

At the same time, she studied Bioinformatics at the Eberhard Karls University of Tuebingen (altogether from 2003 to 2009), and graduating with a Diplom-Informatiker degree (German integrated Masters and Bachelor) in 2009. Please see her curriculum vitae for more biographical information. Katharina became a Ph.D. student in December 2009. Her work focusses on motor control and learning in complex motor tasks such as table tennis. Katharina Muelling was featured in Engadget and the New Scientist. Katharina Muelling can be found on [Google Citations] and [DBLP].
Research Interests: Robotics, Computational Models of Human Motor Control, Robot Learning Architectures, Inverse Reinforcement Learning, Learning by DemonstrationBiographical Information: Please see her curriculum vitae. Projects Contact Information. Overview - Research - Intelligent Autonomous Systems - Informatik - TU Darmstadt. Creating autonomous robots that can learn to assist humans in situations of daily life is a fascinating challenge for machine learning.

While this aim has been a long-standing vision of artificial intelligence and the cognitive sciences, we have yet to achieve the first step of creating robots that can learn to accomplish many different tasks triggered by environmental context or higher-level instruction. The goal of our robot learning laboratory is the investigation of the ingredients for such a general approach to motor skill learning, to get closer towards human-like performance in robotics. We thus focus on the solution of basic problems in robotics while developing domain-appropriate machine-learning methods. Starting from theoretically well-founded approaches to representing the required control structures for task representation and execution, we replace the analytically derived modules by more flexible, learned ones.
Motor Skill Learning A.) Nguyen-Tuong, D.; Peters, J. (2011).