
Knapsack ants.svg - Wikipedia, the free encyclopedia. Summary[edit] Knapsack problem resolved using ants.

Ants discover a small drop of honey, they prefer to concentrate their resources on this drop instead of moving to sugar water, in larger quantity but less interesting for the colony. Aco TSP.svg - Wikipedia, the free encyclopedia. Artificial immune system. In computer science, artificial immune systems (AIS) are a class of computationally intelligent systems inspired by the principles and processes of the vertebrate immune system.

Firefly algorithm. The firefly algorithm (FA) is a metaheuristic algorithm, inspired by the flashing behaviour of fireflies.

The primary purpose for a firefly's flash is to act as a signal system to attract other fireflies. Xin-She Yang formulated this firefly algorithm by assuming:[1] MASSIVE (software) MASSIVE (Multiple Agent Simulation System in Virtual Environment) is a high-end computer animation and artificial intelligence software package used for generating crowd-related visual effects for film and television.

Massive is a software package developed by Stephen Regelous for the visual effects industry. Its flagship feature is the ability to quickly and easily create thousands (or up to millions with current advances in computer processing power) of agents that all act as individuals as opposed to content creators individually animating or programming the agents by hand. Through the use of fuzzy logic, the software enables every agent to respond individually to its surroundings, including other agents. These reactions affect the agent's behaviour, changing how they act by controlling pre-recorded animation clips, for example by blending between such clips, to create characters that move, act, and react realistically.
Some significant examples include: Knapsack problem. Example of a one-dimensional (constraint) knapsack problem: which boxes should be chosen to maximize the amount of money while still keeping the overall weight under or equal to 15 kg?
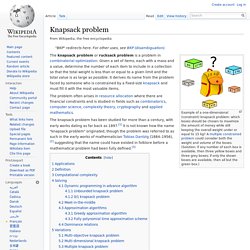
A multiple constrained problem could consider both the weight and volume of the boxes. (Answer: if any number of each box is available, then three yellow boxes and three grey boxes; if only the shown boxes are available, then all but the green box.) The knapsack problem or rucksack problem is a problem in combinatorial optimization: Given a set of items, each with a mass and a value, determine the number of each item to include in a collection so that the total weight is less than or equal to a given limit and the total value is as large as possible.
It derives its name from the problem faced by someone who is constrained by a fixed-size knapsack and must fill it with the most valuable items. Applications[edit] Definition[edit] Mathematically the 0-1-knapsack problem can be formulated as: Let there be items, to. Travelling salesman problem. Aco branches.svg - Wikipedia, the free encyclopedia. Ant colony optimization algorithms. Ant behavior was the inspiration for the metaheuristic optimization technique This algorithm is a member of the ant colony algorithms family, in swarm intelligence methods, and it constitutes some metaheuristic optimizations.

Initially proposed by Marco Dorigo in 1992 in his PhD thesis,[1][2] the first algorithm was aiming to search for an optimal path in a graph, based on the behavior of ants seeking a path between their colony and a source of food. The original idea has since diversified to solve a wider class of numerical problems, and as a result, several problems have emerged, drawing on various aspects of the behavior of ants. Overview[edit] Summary[edit] In the natural world, ants (initially) wander randomly, and upon finding food return to their colony while laying down pheromone trails.
Over time, however, the pheromone trail starts to evaporate, thus reducing its attractive strength. Common extensions[edit] Here are some of most popular variations of ACO Algorithms. to state where. Swarm robotics. Swarm of open-source Jasmine micro-robots recharging themselves Swarm robotics is a new approach to the coordination of multirobot systems which consist of large numbers of mostly simple physical robots.

It is supposed that a desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. This approach emerged on the field of artificial swarm intelligence, as well as the biological studies of insects, ants and other fields in nature, where swarm behaviour occurs. Definition[edit] The research of swarm robotics is to study the design of robots, their physical body and their controlling behaviors. Unlike distributed robotic systems in general, swarm robotics emphasizes a large number of robots, and promotes scalability, for instance by using only local communication.
Video tracking is an essential tool for systematically studying swarm-behavior, even though other tracking methods are available. Goals and applications[edit] Swarm intelligence. Swarm intelligence (SI) is the collective behavior of decentralized, self-organized systems, natural or artificial.

The concept is employed in work on artificial intelligence. Ant robotics. Ant robotics is a special case of swarm robotics.

Swarm robots are simple (and hopefully, therefore cheap) robots with limited sensing and computational capabilities. This makes it feasible to deploy teams of swarm robots and take advantage of the resulting fault tolerance and parallelism.