
A* Pathfinding for Beginners. By Patrick Lester (Updated July 18, 2005) This article has been translated into Albanian, Chinese, Finnish, German, Greek, Korean, Polish, Portuguese, Romanian, Russian, Serbian, and Spanish.
Other translations are welcome. See email address at the bottom of this article. The A* (pronounced A-star) algorithm can be complicated for beginners. While there are many articles on the web that explain A*, most are written for people who understand the basics already. This article does not try to be the definitive work on the subject.
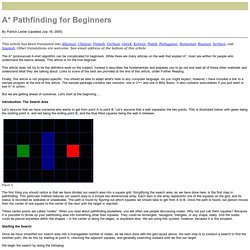
Finally, this article is not program-specific. But we are getting ahead of ourselves. Introduction: The Search Area Let’s assume that we have someone who wants to get from point A to point B. [Figure 1] The first thing you should notice is that we have divided our search area into a square grid. These center points are called “nodes”. Starting the Search We begin the search by doing the following: [Figure 2] Path Scoring where H can be estimated in a variety of ways. 1. Amit’s Game Programming Information. What’s on this page?

I’m interested in producing complexity out of simple parts. This page contains bookmarks that I collected while working on games; I did not write most of the content linked from here. As a result the set of links here reflects the types of things I needed to know: only a few specific topics (not everything related to game programming), general ideas instead of platform-specific information (graphics, sound, compilers), and ideas and designs instead of source code (I find it easier to go from an idea to code than from code to an idea). Other sites, like Gamedev Tuts+, Gamedev, and Gamasutra, cover lots more topics than mine does. Determining how to move around on a map is an interesting problem. These pages are about specific techniques for pathfinding and object movement: My current favorite algorithm is A*, because it can handle varying terrain costs well, and it seems to be faster than most graph searching algorithms.
Code and Demos Data structures Displaying Tiles. A-Star Algorithm in Java. Boids (Flocks, Herds, and Schools: a Distributed Behavioral Model) In 1986 I made a computer model of coordinated animal motion such as bird flocks and fish schools.
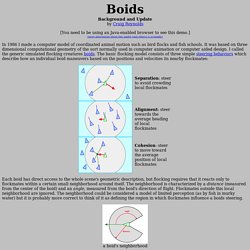
It was based on three dimensional computational geometry of the sort normally used in computer animation or computer aided design. I called the generic simulated flocking creatures boids. The basic flocking model consists of three simple steering behaviors which describe how an individual boid maneuvers based on the positions and velocities its nearby flockmates: Each boid has direct access to the whole scene's geometric description, but flocking requires that it reacts only to flockmates within a certain small neighborhood around itself.
The neighborhood is characterized by a distance (measured from the center of the boid) and an angle, measured from the boid's direction of flight. A boid's neighborhood A slightly more elaborate behavioral model was used in the early experiments. Since 1987 there have been many other applications of the boids model in the realm of behavioral animation.