
Homebuilt Rov Forum. Lost Egyptian city revealed after 1,200 years under sea. From Huffington Post It is a city shrouded in myth, swallowed by the Mediterranean Sea and buried in sand and mud for more than 1,200 years.
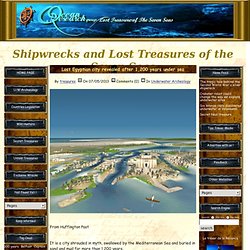
But now archeologists are unearthing the mysteries of Heracleion, uncovering amazingly well-preserved artifacts that tell the story of a vibrant classical-era port. Known as Heracleion to the ancient Greeks and Thonis to the ancient Eygptians, the city was rediscovered in 2000 by French underwater archaeologist Dr. Franck Goddio and a team from the European Institute for Underwater Acheology (IEASM) after a four-year geophysical survey.
Commercial. DIY. Anodizing. Instruments. Lighting. Sensors. Calculators.