
Build an Arduino shield for Quadcopter - Arduino Adapter. I have been searching for ideas of making a Quadcopter Arduino flight controller Adapter to sit my Arduino nano board and the GY80, also have some header pins for motors and receiver to make the cabling tidy.

There are a lot of Arduino shields people have designed for the Quadcopter. I didn’t follow any of the designs. I actually didn’t follow any planned design, and solder the parts on the veroboard as I go along. Here is my own build. I deliberately left some empty space on the top right corner, so I can extend the board if I want to for example for the GPS module or ultrasonic sensor and so on. This design has a few disadvantages, and there are some quick fixes I applied. BEC voltage input The ESC BEC voltage input should have been all disconnected except one of them. I should actually utilize these BEC 5V voltage supply. Motor and Receiver header pins position motor pins should be placed on all four directions for easier access. Microcontroller Socket Round adapter board by Warthox. DIY ARDUINO FLIGHT CONTROLLER. To Tell you the truth this is not the hard part of this build its actually easy as long as you follow the steps.
Prepare the following Print out the PDF in HIGH Quality Prepare the baby OIL Prepare pre synthesized PCB 6x6cm Prepare a container filled with ferric Chloride Prepare a container with developer powder ... 3 tsp developer 1cup tap water (agitate until the powder dissolved) Prepare 10 Florescent lamps. Aeroquad - An Arduino based four rotor R/C helicopter or quadrocopter. Check out our main website and forum at For feature requests or bug reports, please submit them to: If you are interested in obtaining the latest and greatest code, please visit our main repository at: The AeroQuad is an open-source hardware and software project dedicated to the construction of remote controlled four-rotor helicopters, also known as quadcopters or quadrocopters.
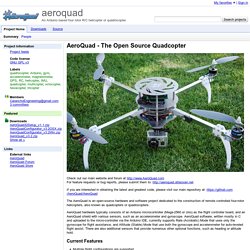
AeroQuad hardware typically consists of an Arduino microcontroller (Mega-2560 or Uno) as the flight controller board, and an AeroQuad shield with various sensors, such as an accelerometer and gyroscope. AeroQuad software, written mostly in C and uploaded to the micro-controller via the Arduino IDE, currently supports Rate (Acrobatic) Mode that uses only the gyroscope for flight assistance, and Attitude (Stable) Mode that use both the gyroscope and accelerometer for auto-leveled flight assist. There are also additional sensors that provide numerous other optional functions, such as heading or altitude hold. Build A Quadcopter From Scratch - Hardware Overview. In this article I will be talking about quadcopter components and how to choose them. This is part of the tutorial series on how to build a quadcopter. In the next post I will be talking about software, how to go about the algorithm and programming.
If you are planning on building a quadcopter but not sure how, this is the right place for you. Doing research is pretty boring, so I am trying to put together a comprehensive tutorial about quadcopter, hope it helps you as much as it helped me. Building a quadcopter from scratch takes a lot of time and effort. For more tutorials, check out this list. Multicopter Tutorial List.
I have been sharing my experience and writing a lot about building multicopters, FPV etc, but still, many people ask me questions that I have already answered in some of my posts.

Clearly just by throwing people with a lot of information is not going to help them learn quicker, so I decided to put these information into a more structured, better presented tutorial. I included most if not all of my multicopter related posts in this article, hoping that it could make it easier for everyone to find what they need.
If you are a beginner, I strongly recommend you read this multicopter beginner tutorial first. It gives you an basic understanding how a multicopter works, and what hardware is required. There are different configurations in multicopter, such as 2 motors, 3 motors, 4 motors. You might be wondering if there are any tips about flying the aircraft for newcomers of this exciting hobby, this post “how to get started with quadcopter” might give you a hint. World's First Hoverbike Drone. Quadcopter Dynamics and Simulation - Andrew Gibiansky. A helicopter is a flying vehicle which uses rapidly spinning rotors to push air downwards, thus creating a thrust force keeping the helicopter aloft.
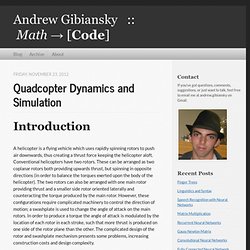
Conventional helicopters have two rotors. These can be arranged as two coplanar rotors both providing upwards thrust, but spinning in opposite directions (in order to balance the torques exerted upon the body of the helicopter). The two rotors can also be arranged with one main rotor providing thrust and a smaller side rotor oriented laterally and counteracting the torque produced by the main rotor. However, these configurations require complicated machinery to control the direction of motion; a swashplate is used to change the angle of attack on the main rotors. In order to produce a torque the angle of attack is modulated by the location of each rotor in each stroke, such that more thrust is produced on one side of the rotor plane than the other.