
Thymio II en vehicule d'exploration - Thymio & Aseba. Cette page décrit la réalisation d'un véhicule d'exploration basé sur une structure mécanique en plastiques faites de briques bien connues, la motorisation et les capteurs du Thymio, le tout contrôlé par un Raspberry PI avec Linux et Wi-Fi, alimenté par une batterie à rechargement solaire.
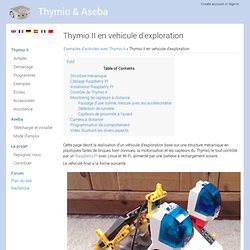
Le véhicule final a la forme suivante : Les sections ci-dessous décrivent sommairement comment implémenter ce véhicule d'un point de vue mécanique, électronique (connexions) et logiciel. Les possibilités logicielles sont très variées, du moment que ce véhicule porte sur soi un ordinateur avec LINUX, mais nous ne décrivons ici que quelques possibilités. Pour faire la base mécaniques des chenilles, nous avons pris les premiers pas du véhicule de la boîte suivante : Nous avons donc retenu les supports des chenilles et la structure de base qui relie les deux chenilles. Le châssis de base a ensuite été modifié selon les points suivants : Combinées, ces modifications donnent la version suivante : Un rover « Curiosity » à base de Raspberry Pi. Dans le numéro 170 de la revue PROGRAMMEZ, Lucas DUPUIS nous propose une description de son rover, baptisé CuriosiPi.

Réalisé sur une base de rover Tamiya équipée de chenilles, ce robot est animé par un Raspberry Pi relié par WIFI au pilote de l’engin. Bien sûr il n’est pas question ici de construire un robot qui pourrait concurrencer le visiteur qui circule sur Mars depuis août 2012. Quoique… la comparaison entre le système informatique embarqué sur le rover de la NASA et notre framboise314 peut donner à réfléchir (voir cet article de PoBot)… Lucas au travers de cet article de 5 pages nous raconte la conception de son rover.
Un jeune chiot un peu turbulent qu’il faut surveiller et voilà une application rêvée pour le Raspberry Pi. Il faut d’abord choisir la caméra. Vient ensuite le choix des servomoteurs destinés à orienter le caméra, ainsi que la méthode utilisée pour piloter les servos avec un Raspberry Pi. C’est un serveur Flask qui est utilisé. Robot RAPIRO : un petit assistant programmable Raspberry Pi. Proposé sur Kickstarter, RAPIRO est un adorable petit assistant humanoïde mécanique conçu pour fonctionner avec un Raspberry Pi et doté d’un servo-contrôleur compatible Arduino.

Fonctionnant avec quatre piles AA ou à l’aide d’une batterie Li-Po 18650, le RAPIRO est équipé de deux ports USB, d’un port Ethernet, de LEDs RVB pour les yeux ainsi que de 12 servomoteurs. Capable de saisir des objets, de tourner la tête et le torse mais aussi de se déplacer, ses créateurs espèrent en faire bien plus qu’un jouet et lui ont d’ores et déjà ajouté la capacité de se connecter en Wi-Fi afin qu’il puisse recevoir des notifications (mail, Twitter, Facebook …etc.). Bien entendu, vous aurez deviné que le principal intérêt du RAPIRO réside dans la possibilité de le programmer vous-même afin qu’il intègre de nouvelles fonctionnalités (son créateur explique d’ailleurs comment ajouter une caméra à celui-ci).
Présentation du RAPIRO Monter une caméra dans un RAPIRO. Robot RAPIRO : un petit assistant programmable Raspberry Pi. Un robot en kit pensé pour le Raspberry Pi. RAPIRO est un humanoïde en kit conçu pour fonctionner avec Raspberry Pi et son module de caméra.

Facile à assembler, le robot est livré avec des LED RVB, 12 servomoteurs et un contrôleur servo compatible avec Arduino. Le tout est proposé à un prix abordable de 269 euros. Mis au point par ShotaIshiwatari, le prototype a été conçu à l’aide de logiciels CAO, en collaboration avec un bureau d’impression 3D. Chacune de ses 12 articulations est alimentée par un petit servo, ce qui lui permet d’effectuer des mouvements. Le robot est alors en mesure de se déplacer ou encore bouger les bras et la tête pour mener à bien une tâche. Projet lancé sur kickstarter, l’objectif de 20.000 dollars est déjà dépassé alors qu’il reste encore une cinquantaine de jours.