
Wiki. Dual Motions. The "dual" of a polyhedron can be obtained by replacing all the faces of the polyhedron by new vertices and then connecting all the new vertices together.
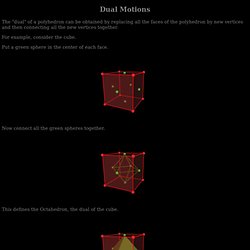
For example, consider the cube. Put a green sphere in the center of each face. Now connect all the green spheres together. This defines the Octahedron, the dual of the cube. We can scale (grow) the Octahedron until its edges intersect the edges of the cube. We consider here only the Platonic "solid" polyhedra. The Tetrahedron is listed twice because the dual of the Tetrahedron is another Tetrahedron. For these Platonic solids (Tetrahedron, Cube, Octahedron, Icosahedron, Dodecahedron) there is another way to obtain the dual polyhedron. If we rotate the edges of the polyhedron by 90 degrees (and possibly adjust the edge lengths) we get the daul polyhedron.
For the Tetrahedron case above, the edge lengths are not changed during rotation. And for the case of the regular Dodecahedron, the edges need to grow by a factor of the Golden Mean, which is. Home > Polyhedral toy > Yoshimoto Cube. Hyperbolic Paraboloids. Erik Demaine, Martin Demaine, and Anna Lubiw A hyperbolic paraboloid is an infinite surface in three dimensions with hyperbolic and parabolic cross-sections.
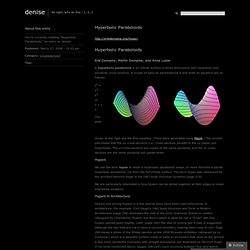
A couple of ways to parameterize it and write an equation are as follows: z2 = x2 – y2 orx = y z The plots shown to the right use the first equation. GH-Plugins. USD Modular Robotics Research Lab - Robots. EPFL. Roombots. Modular robotics for adaptive and self-organizing furniture This project intends to design and control modular robots, called Roombots, to be used as building blocks for furniture that moves, self-assembles, self-reconfigures, and self-repairs.
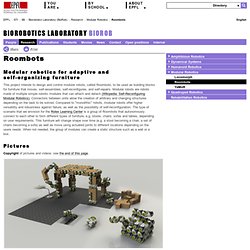
Modular robots are robots made of multiple simple robotic modules that can attach and detach (Wikipedia: Self-Reconfiguring Modular Robotics). Connectors between units allow the creation of arbitrary and changing structures depending on the task to be solved. Compared to "monolithic" robots, modular robots offer higher versatility and robustness against failure, as well as the possibility of self-reconfiguration. The type of scenario that we envision for the Rolex Learning Center is a group of Roombots that autonomously connect to each other to form different types of furniture, e.g. stools, chairs, sofas and tables, depending on user requirements.
Pictures. Muscle Wire Demo Spring from ThinkGeek. Shape-shifting robots. By combining origami and electrical engineering, researchers at MIT and Harvard are working to develop the ultimate reconfigurable robot — one that can turn into absolutely anything.

The researchers have developed algorithms that, given a three-dimensional shape, can determine how to reproduce it by folding a sheet of semi-rigid material with a distinctive pattern of flexible creases. To test out their theories, they built a prototype that can automatically assume the shape of either an origami boat or a paper airplane when it receives different electrical signals. The researchers reported their results in the July 13 issue of the Proceedings of the National Academy of Sciences. EPFL. Modlab » Archive » SMORES. Roombots. Polymorphic Robotics Laboratory - SuperBot. Intro-Movies 1.
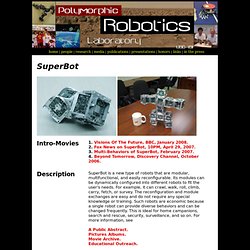
Visions Of The Future, BBC, January 2008. 2. Fox News on SuperBot, 10PM, April 29, 2007. 3. Multi-Behaviors of SuperBot, February 2007. 4. Beyond Tomorrow, Discovery Channel, October 2006. Programmable Assembly With Universally Foldable Strings (Moteins) Programmable Assembly With Universally Foldable Strings (Moteins). 12 pages, 2011.

Understanding how linear strings fold into 2-D and 3-D shapes has been a long sought goal in many fields of both academia and industry. This paper presents a technique to design self-assembling and self-reconfigurable systems that are composed of strings of very simple robotic modules. We show that physical strings that are composed of a small set of discrete polygonal or polyhedral modules can be used to programmatically generate any continuous area or volumetric shape. Self Reconfigurable Modular Technology - Presented by Desmond Innovation, LLC. Locomotion Capabilities of a Modular Robot with Eight Pitch-Yaw-Connecting Modules. Modbot. Home. Biomimetic Robotics. Biomimetics.
Velcro tape mimics biological examples of multiple hooked structures such as burs.

Biomimetics or biomimicry is the imitation of the models, systems, and elements of nature for the purpose of solving complex human problems.[1] The terms biomimetics and biomimicry come from Ancient Greek: βίος (bios), life, and μίμησις (mīmēsis), imitation, from μιμεῖσθαι (mīmeisthai), to imitate, from μῖμος (mimos), actor. A closely related field is bionics.[2] Possible applications[edit] Biomimetics could in principle be applied in many fields. Research. We have a proud record of achievement in education and research in the Department.
The 2008 Research Assessment Exercise rated the majority of our research as "world-leading or internationally excellent. " Our research covers a full spectrum extending from fundamental investigations to applied research. Many of these activities are carried out in conjunction with industry and other universities, both in the UK and overseas. Morphogenetic robotics. Morphogenetic robotics [1] generally refers to the methodologies that address challenges in robotics inspired by biological morphogenesis.[2][3] Background[edit] Differences to epigenetic[edit] Morphogenetic robotics is related to, but differs from, epigenetic robotics.
What is self-assembly. Self-assembly is a branch of nanotechnology in which objects, devices, and systems form structures without external prodding.
Nanotechnology is a field of engineering that deals with design, manufacture, and control on a scale of a few nanometer s (nm) or less, where 1 nm = 10 -9 meters. In self-assembly, the individual components contain in themselves enough information to build a template for a structure composed of multiple units. An example is the construction of a monolayer, in which a single layer of closely-packed molecules sticks to a surface in an orderly and closely-packed fashion. Self-assembly should not be confused with positional assembly , a technique that has been suggested as a means to build objects, devices, and systems on a molecular scale using automated processes in which the components that carry out the construction process would follow programmed paths.
Borromean rings. Mathematical properties[edit] Although the typical picture of the Borromean rings (above right picture) may lead one to think the link can be formed from geometrically ideal circles, they cannot be. Freedman and Skora (1987) prove that a certain class of links, including the Borromean links, cannot be exactly circular.
Alternatively, this can be seen from considering the link diagram: if one assumes that circles 1 and 2 touch at their two crossing points, then they either lie in a plane or a sphere. Self-assembly swarm modular robotic Haiyuan Li. Self-assembling robots Being inspired form multicellar organism and mophogenetic robots. The aim of this research is to develop swarm robotics and conduct research on the swarm intelligenc, self-assembly and co-evolution of the body and brain for autonomous morphogeneous. Differing from swarm robot, self-reconfigurable robot and morphgenetic robot, the research focuses on self-assembly swarm modular robots that interact and dock as an autonomous mobile module with others to achieve swarm intellegence and furtherly discuss the autonomous construction in space station and exploratary tools and artificial complex structures.
Each Sambot robot can run as an autonomos individual in wheel and besides, using combination of the sensors and docking mechanism, the robot can interact and dock with the enviroments and other robots. By the advantage of motion and connection, Sambot swarms can aggregate into a symbiotic or whole organism and generate locomotion as the bionic articular robots. Self-Assembly Lab. Hod Lipson. Watch: MIT's Self-Assembling Robots Offer Whiffs of Optimus Prime.
Photo: M. Scott BrauerPhoto: M. Scott BrauerPhoto: Kyle GilpinPhoto: M. Cubli. Raffaello.name. Robotic Chair. Self-reconfiguring modular robot. Autonomous Reconfiguration in a Self-assembling Multi-robot System. Hod Lipson. Main Page - SOSwiki. Self-Reconfigurable Robots. What is M-TRAN. Self-Assembling Drones Take Flight In 'Distributed Flight Array' VIDEO. Polymorphic Robotics Laboratory - CONRO. Introduction Movie (6/18/04) (6MB, 21MB) Web.archive.org/web/20110607072522/ Developmental robotics. Developmental Robotics (DevRob), sometimes called epigenetic robotics, is a scientific field which aims at studying the developmental mechanisms, architectures and constraints that allow lifelong and open-ended learning of new skills and new knowledge in embodied machines. Headless cat robot could be future of search-and-rescue missions. Animal Architecture: Buckminster Fuller's Tensegrity. In 1932 R. Pop Up Tents, Self Erecting Tent, Dome Tents, Cabin Tent, Wall Tents, Canvas Tent, Screen Tents.
Creativemachines.cornell.edu/papers/GECCO05_Paul.pdf. Skylar Tibbits: O surgimento da "impressora 4D" Self-Assembly of Lithographically Patterned 3D Micro/Nanostructures. Kinematics. Kinematics is a system for 4D printing that creates complex, foldable forms composed of articulated modules. The system provides a way to turn any three-dimensional shape into a flexible structure using 3D printing. Kinematics combines computational geometry techniques with rigid body physics and customization.
Practically, Kinematics allows us to take large objects and compress them down for 3D printing through simulation. It also enables the production of intricately patterned wearables that conform flexibly to the body. Self-assembling furniture 'grows like popcorn' Hypernatural intelligence: A Fellows Friday conversation. Fashion designer and BioCouture founder Suzanne Lee harnesses the labor of microorganisms to grow clothing. Com Mindstorms. Von Neumann universal constructor. The first implementation of von Neumann's self-reproducing universal constructor.[1] Three generations of machine are shown: the second has nearly finished constructing the third.
The lines running to the right are the tapes of genetic instructions, which are copied along with the body of the machines. The machine shown runs in a 32-state version of von Neumann's cellular automata environment, not his original 29-state specification. Nicholas Negroponte. Molecular self-assembly. #71: Slime Molds Show Surprising Degree of Intelligence. Slime mold. Plants In Motion. Web.mit.edu/lms/www/PDFpapers/Zhang & Altman 1999.pdf.
Thigmonasty.