
CloudCompare. Un article de Wikipédia, l'encyclopédie libre.
CloudCompare 2.7 CloudCompare est un logiciel d'édition et de traitement de nuages de points 3D (ainsi que de maillages surfaciques triangulaires). Il a été initialement créé pour effectuer des comparaisons entre deux nuages de points 3D denses (tels que ceux obtenus avec des scanners lasers) ou entre un nuage et un maillage. Il est basé sur une structure octree particulière optimisée pour ce type d'application. Il est aussi conçu pour traiter et afficher de très gros nuages de points (plus de 10 millions de points typiquement). Leica Geosystems. 3D, drones, and multispectral images: an exploratory project. It doesn’t matter what narrative you hear on climate change, we can agree that keeping the earth’s forests healthy is essential to the future.
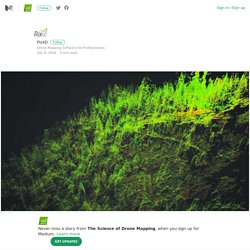
Large air purifiers, like the giant sequoia trees in California, are key for the environment and studied to measure how much CO2 they capture. As part of a joint project, Pix4D and Parrot used drones and multispectral technology to create a 3D NDVI point cloud of Whitaker’s Forest in Kings Canyon National Park, giving researchers access to information previously hidden. Multispectral images capture what human eyes cannot: information from spectral bands beyond our sight range.
While mapping and modeling from images is increasingly commonplace, multispectral imagery has been limited to 2D map creation. This is a tremendous limitation for all those using multispectral imagery, as without 3D, critical pieces of information may be missing. New 3D Scanning Map: Find the Nearest 3D Scanner! The need for a 3D scanner can be motivated by many reasons: reverse engineering, industrial CAO, medical devices, tooling, etc… but often, buying a 3D scanner is not the adequate solution.

MSoft software. We offer a software solution for big and small as well as cost effective pricing.

What do you need to scan? How often do you scan? How much do you scan? No two customers are alike. That’s why we offer different licensing models tailored to your needs. Inc. Orbit GeoSpatial Technologies. 3d scan. Scanner 3 D. MobileFusion transforme un smartphone en scanner 3D. Par Stéphane Larcher, le 25 août 2015 12:27 L’application mise au point par Microsoft Research ne nécessite aucun matériel supplémentaire ni connexion Internet pour réaliser un scan 3D depuis n’importe quel smartphone.

Dévoilé hier sur le site de Microsoft Research, le projet MobileFusion sera officiellement présenté au début du mois d’octobre à l’occasion d’une conférence sur la réalité augmentée qui se tiendra à Fukuoka au Japon. Selon la publication, la capture 3D est aussi simple à réaliser que la prise d’une photo ou d’une vidéo depuis son smartphone.
Les chercheurs de Microsoft affirment que « MobileFusion est meilleur que n’importe quelle autre méthode de scan 3D avec un appareil mobile dans la mesure où il n’a pas besoin de matériel supplémentaire, ni même d’une connexion Internet pour fonctionner. Bevel - 3D Photography for any Smartphone or Tablet by Matter And Form Inc. Risks and challenges As with any product development, unforeseen challenges are inevitable.
Drone photogrammétrie Pix4d. Contenu du kit RTF : - Drone - Caméra HD sur nacelle gyrostabilisée 3 axes - Radiocommande avec support Smart Phone - 5 x batteries Phantom 2 - 2 x chargeur - Valise de transport IP67 - Logiciel Pix4D Mapper, 3 mois de location (directement deductible de la licence intégrale) - Rédaction de votre MAP S1 et S3 - Formation 3 jours du logiciel de captation et de traitement Simplifiez vos relevés topographiques à l’aide d’un drone autonome !

Le Phantom 2 Vision PLUS équipé du logiciel Pix4D vous permet d’acquérir facilement des clichés aériens et de les visualiser en 3D.Editez le plan de vol de votre drone depuis votre smartphone et récupérez les photos afin de les exploiter sur le logiciel Pix4Dmapper. eXom. Latest Structure SDK for iOS topics - Structure Sensor & Structure SDK Forums. MeshLab ressources et tutoriels. Geomagic Design X. Geomagic Design X (précédemment Rapidform XOR), logiciel d’ingénierie inverse le plus complet du marché, associe la CAO par historique au traitement de données de numérisation 3D pour vous permettre de créer des modèles pleins à partir d’éléments, modifiables et compatibles avec votre logiciel de CAO.

Étendez vos capacités de conception. Avec le bras de mesure ScanArm de FARO, les sculptures vivent de nouvelles vies. Préservation du patrimoine - Restaurée en profondeur, la Victoire de Samothrace du musée du Louvre va connaître une nouvelle vie.

Grâce à sa numérisation à l'aide d'un bras de mesure ScanArm de FARO, cette sculpture emblématique est désormais connue dans les moindres détails... Avec ses sept millions de personnes qui viennent l'admirer chaque année, la Victoire de Samothrace est sans conteste une des principales attractions du Musée du Louvre.
Son exposition tout en haut de l'imposant escalier Daru en accentue son style aérien, célébré par tous. Pourtant, depuis sa dernière restauration en 1934, la sculpture de marbre blanc avait beaucoup perdu de son éclat. Une restauration en profondeur est alors décidée, d'un montant d'environ 4 millions d'euros, financée par le mécénat. « Nous ne sommes pas intervenus dans le travail de restauration proprement dit. AGP a utilisé un modèle ScanArm de 3,7 m d'envergure, le plus important proposé par FARO. The world's first cloud-based 3D Scanner Sense 3D scanner.
CVG @ ETHZ - Research. Distortion in Multiple View Geometry Multiple view geometry is well-understood for the case of ideal pinhole cameras and many algorithms exist to estimate epipolar geometry, trifocal tensors or homographies.
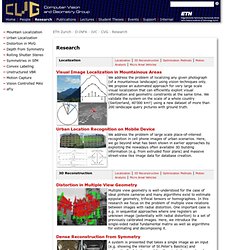
In this research we focus on the problem of multiple view relations between images with radial distortion. One important case is e.g. in sequential approaches where one registers an unknown image (potentially with radial distortion) to a set of previously calibrated images. Here, we introduce the single-sided radial fundamental matrix as well as algorithms for estimating and decomposing it. Skanect by Occipital. Kubity, your 3D experience. Tutorial. To Move the Camera: Zoom:Shift+scroll Rotate:Shift+ Pan:Ctrl+ ✓ Viewer✓ Modeler (Adjust Camera Mode) 3D Printing. ZEB1 Pricing. Part Number: GS_ZEB1_SCAN_SYSTEM Comprising of: Scanning headData LoggerBatteryChargerBackpack. Zebedee - Autonomous Systems Laboratory. The Matterform 3D Scanner. The Media Computing Group : 3D Scanning. Rubicon 3D scanner.