
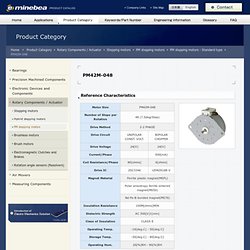
Freeduino Motor control shield KIT for Arduino. Minebea Motor. Home Product Category Rotary Components / Actuator Stepping motors PM stepping motors.
Moteur pas à pas bipolaire. Dans une imprimante j'ai récupéré des moteur PAP, 48 steps, 24volts bipolaire (4 fils).J'ai essayer d'utiliser la librairie Stepper.h avec l'exemple sur Arduino-Playground, mais ça ne fonctionnait pas correctement.J'ai trouvé un site sur le quels sont décrites les séquences de fonctionnement d'un PAP : En m'inspirant du mode "demi-pas", j'ai fait ce petit code : int A_Pin = 13; // H-bridge patte 1 int B_Pin = 9; // H-bridge patte 2 int C_Pin = 12; // H-bridge patte 9 int D_Pin = 10; // H-bridge patte 15 void Step_0(); void Step_1(); void Step_2(); void Step_3(); void Step_4(); void Step_5(); void Step_6(); void Step_7(); void Step_8(); void Step_0(){

Using PepperMill to turn a motor into a sensor. Nicolas Villar sent me a sample of the PepperMill, a new sensor board he and Steve Hodges designed at Microsoft Research in Cambridge, UK.

It’s a nifty little board. Project – DC Motor Control. This project shows how to control a DC motor's direction (running forwards and backwards) using an H-bridge.
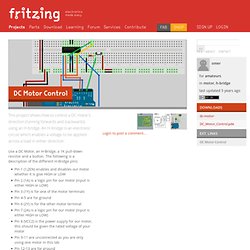
An H-bridge is an electronic circuit which enables a voltage to be applied across a load in either direction. MotorKnob. Learning Examples | Foundations | Hacking | Links Examples > Stepper Library Stepper Motor Knob Stepper motors, due to their unique design, can be controlled to a high degree of accuracy without any feedback mechanisms.
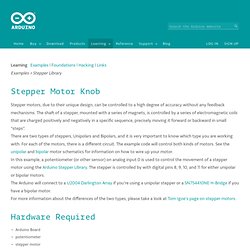
The shaft of a stepper, mounted with a series of magnets, is controlled by a series of electromagnetic coils that are charged positively and negatively in a specific sequence, precisely moving it forward or backward in small "steps". There are two types of steppers, Unipolars and Bipolars, and it is very important to know which type you are working with.
Open Source Robotic Arm by oomlout. Perhaps one of the funnest projects we have attempted around the .
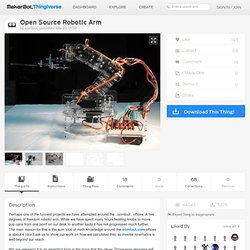
:oomlout:. offices. A five degrees of freedom robotic arm. While we have spent many hours twisting knobs to move pop cans from one point on our desk to another sadly it has not progressed much further. The main reason for this is the sum total of math knowledge around the oomlout.com offices is about 4 (don't ask us to show our work on how we calculated this) so inverse kinematics is well beyond our reach.
We are releasing it in an imperfect form in the hope that the clever Thingiverse denizens will be able to make it better. Arduino XMAS hitcounter. Christmas is coming closer, so here is my contribution to put you in the right mood.
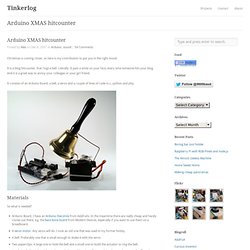
It is a blog hitcounter, that rings a bell. Literally. It puts a smile on your face, every time someone hits your blog. And it is a great way to annoy your colleages or your girl friend. It consists of an Arduino board, a bell, a servo and a couple of lines of code in c, python and php. Materials. [PoBot] Contrôleur simple d'un moteur électrique. Avec un seul circuit de type pont en H (L293 ou SN754410), on peut contrôler deux moteurs à courant continu ou un seul moteur pas à pas à deux phases.
![[PoBot] Contrôleur simple d'un moteur électrique](http://cdn.pearltrees.com/s/pic/th/controleur-moteurs-electriques-11523119)
C’est ce que nous avons fait lors de nos ateliers hebdomadaires et que nous vous présentons ici. Le but de cet article est de reproduire rapidement une expérience simple : faire tourner un moteur électrique à courant continu ou un moteur pas-à-pas (tels que ceux qu’on récupère dans des imprimantes) avec un composant simple et peu cher. Bien sûr, il faut adapter votre choix de pont en H selon la puissance nécessaire : un gros moteur aura besoin d’un pont plus important (tel le L298). Pas de grande théorie sur les ponts en H, mais juste un rappel : les moteurs électriques que nous allons utiliser font tourner un aimant en faisant circuler un courant dans des bobines.
ArduinoExpertMoteursPAPTestSimple. ARDUINO - EXPERT - MOTEURS PAS A PASPar X.

HINAULT - Créé le 10/03/2010 Présentation Ce programme teste la rotation d'un moteur pas à pas bipolaire connecté sur 4 broches via une interface double driver (ici une carte Dual Driver 1A (basée sur TB6612FNG) - 6 euros environ). Le programme réalise une rotation complète du moteur dans 1 sens, puis dans l'autre sens. Voir également la librairie Stepper. ArduinoExpertCanCapteurDistanceGP2D12RadarServo. Playground - SingleServoExample.
Introduction This tutorial explains how to control a servo from your computer using arduino, processing and Arduino Diecimilia.

Don't be fooled, almost none of this is my own code. I've just done all the cut and pasting for you :p This example uses the Software Servo Library. Connections. ArduinoExpertMoteurCCControlerSensVitesseRotation. ARDUINO - EXPERT - MOTORISATIONSPar X. HINAULT - Créé le 10/02/2010 - Mis à jour le : 10/02/2010 1. Présentation. MATERIELArduinoShieldDFRduinoMotorDrive1AL293Fiche. MATERIEL - Arduino Shield – Créé le 16/02/2011. Acheté ici : Arduino Boards from .:oomlout:. Reference. Référence : Langage Arduino : [ Mini | Standard | Etendue | Maxi ] Librairies : [ Vue d'ensemble | Synthèse ] Infos : [ Comparaison | Changements ] Nouveau : Découvrez nos kits de machines opensource et notre nouveau site dédié !
Voir la référence étendue pour davantage de fonctions avancées du langage Arduino et la page des librairies pour interfaçage avec des types de matériel particuliers (afficheur LCD par exemple). Les programmes Arduino peuvent être divisés en trois partie principales: la structure, les valeurs (variables et constantes) et les fonctions. Logiciels: arduino. Arduino est une plateforme open-source pour la création d’interfaces tangibles et d’installations interactives (physical computing). Elle est composée d’une plaque d’entrée/sortie simple (que l’on peut relier à des capteurs ou des actionneurs), et d’un système de développement basé sur le langage Wiring (basé lui-même sur Processing). Arduino peut être utilisé pour créer des installations autonome (stand alone), fonctionnant sans être connectés à un ordinateur), ou être connecté à certains logiciels (par exemple Flash, Processing, MaxMSP).
L’interface de programmation peut être téléchargée gratuitement (versions Windows, Mac OSX, et Linux). Elle permet d’éditer (dans une version adaptée du langage C/C++), compiler et télécharger sur le processeur (via la connexion USB) les programmes créés. Prix de la carte I/O "Duemilanove" : environ 22 Euros. Voir d'autres images du Workshop Arduino (Erg, cours d'arts numériques, février 2009) sur mon blog. Voir les articles "Arduino" sur mon blog. CIRC-04 (Servos) « .:oomlout:. Arduino : Tutoriel pour cabler et commander un moteur pas à pas 4 poles. Aillant récemment obtenu un module Arduino Uno, je me suis essayé à quelques bidouillages... Voici donc comment j'ai procédé pour câbler et commander un moteur pas à pas 4 pôles, issu tout droit d'un vieux lecteur de CD-ROM : La document technique de ce genre de moteur est disponible ici : Pour réaliser ce montage il faudra aussi ce procurer un circuit intégré 754410 (QUADRUPLE HALF-H DRIVER) afin de donner un peu de puissance au moteur pas à pas.
La documentation du CI est ici : On peut le trouver chez n'importe quel magasin d'électronique pour quelques euros. ArduinoExpertCanPositionServomoteur. ARDUINO - EXPERT - CAN - SERVOPar X. HINAULT - Créé le 20/02/2010 1. Présentation. Servo. ArduinoExpertCanPositionServomoteurx3. ARDUINO - EXPERT - CAN - SERVOPar X. HINAULT - Créé le 28/02/2010 1. Présentation Ce programme contrôler 3 servomoteurs à l'aide de 3 résistances variables. Ceci peut être utile pour fabriquer par exemple un bras articulé contrôlé par 3 potentiomètres. COMPRENDREAlimentationModules.
ArduinoExpertSerieDepuisPCPositionServomoteur. // --- Programme Arduino ---// par X. HINAULT - 01/2010 // --- Que fait ce programme ? ---/* Test de la position d'un servomoteur par saisie directe de la largeur d'impulsion dans le Terminal côté PC*/ // --- Fonctionnalités utilisées ---// Utilise la connexion série vers le PC // Utilise un servomoteur.