
CIRCUITOS ELECTRONICOS. Un teclado matricial es un simple arreglo de botones conectados en filas y colúmnas, de modo que se pueden leer varios botones con el mínimo número de pines requeridos.
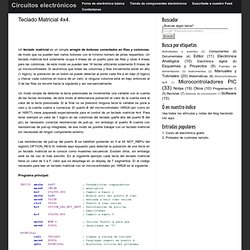
Un teclado matricial 4x4 solamente ocupa 4 lineas de un puerto para las filas y otras 4 lineas para las colúmnas, de este modo se pueden leer 16 teclas utilizando solamente 8 líneas de un microcontrolador. Si asumimos que todas las columnas y filas inicialmente están en alto (1 lógico), la pulsación de un botón se puede detectar al poner cada fila a en bajo (0 lógico) y checar cada columna en busca de un cero, si ninguna columna está en bajo entonces el 0 de las filas se recorre hacia la siguiente y así secuencialmente.
Un modo simple de detectar la tecla presionada es incrementar una variable con la cuenta de las teclas revisadas, de este modo al detectaruna pulsación el valor de la cuenta será el valor de la tecla presionada. Existen otros métodos de manejar teclados matriciales, pero creo que ésta es la más sencilla. Teclado-matricial-4x4.
Psicología de la posible evolución del hombre (Conferencia II) » Diario de un andante. Microcontrolador PIC16F887 - Microcontroladores PIC – Programación en C con ejemplos. Capitulo 3: Microcontrolador PIC16F887 El PIC16F887 es un producto conocido de la compañía Microchip.

Dispone de todos los componentes disponibles en la mayoría de los microcontroladores modernos. Por su bajo precio, un rango amplio de aplicaciones, alta calidad y disponibilidad, es una solución perfecta aplicarlo para controlar diferentes procesos en la industria, en dispositivos de control de máquinas, para medir variables de procesos etc. Algunas de sus características principales se enumeran a continuación. La mayoría de los pines del microcontrolador PIC16F887 son multipropósito como se muestra en la figura anterior. RA3 Tercera entrada/salida digital del puerto AAN3 Tercera entrada analógicaVref+ Referencia positiva de voltajeC1IN+ Entrada positiva del comparador C1 La funcionalidad de los pines presentados anteriormente es muy útil puesto que permite un mejor aprovechamiento de los recursos del microcontrolador sin afectar a su funcionamiento.
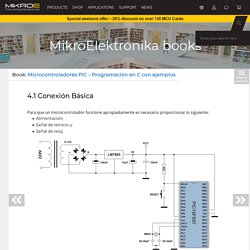
Vamos a hacerlo en mikroC... CONTROL DE UN MOTOR DE CORRIENTE DIRECTA PROYECTO TARJETA DE DESARROLLO EB88 PUNTO FLOTANTE S.A. Proyectos. Ejemplos - Microcontroladores PIC – Programación en C - MikroElektronika. 4.1 Conexión Básica Book: Microcontroladores PIC – Programación en C con ejemplos Introducción Para que un microcontrolador funcione apropiadamente es necesario proporcionar lo siguiente: Alimentación;Señal de reinicio; ySeñal de reloj.
Microcontroladores PIC - Complic ndonos un poco. .: Antes de empezar Si bien nos vamos a complicar con las siguientes lecciones, sería bueno que consultes el Set de instrucciones , así será mas fácil que comprendas cada línea de código que se escribe, ya que cada una está acompañada de su respectivo ejemplo, y una vez lo comprendas puedes quedarte con el Resumen de instrucciones. Lo que haremos ahora será un programa que encienda 4 LED's en forma secuencial, y para ello recurriremos a la rutina de retardo del programa anterior, que espero lo hayas comprendido, si no es así regresa y no vengas aquí hasta que lo entiendas :o)) Ok, sigamos.
El circuito será el siguiente... Y el código que realiza la secuencia es el que viene a continuación. Utilizando PICs: Desplazamiento de Luces usando LEDs. Utilizando PICs: Contador de 0-9 con PIC16F84A. Control motor de continua. Diseños de proyectos con Microcontroladores Pic - Esquemas, Tutoriales. Controlar un servomotor con un microcontrolador pic. Con este circuito podemos situar la posicion de un servomotor de los usados en modelismo en 256 posiciones diferentes, la cual se reflejara sobre 8 diodos LED.

Manteniendo presionado el pulsador IZQ o DER variaremos la posicion sel servo en un sentido u otro, al mismo tiempo de que los led van indicando secuencias diferentes. Aproximadamente mediante la actuacion de estos 2 pulsadores tardara 50seg el servomotor en realizar todo el recorrido, pero si actuamos al mismo tiempo sobre el pulsador TURBO, se reducira este tiempo a solo 5seg. Tenemos la posibilidad de accionarlo mediante los microswitch, y llevar al servo a unas posiciones concretas sin necesidad de tener que verlo. Ejemplos en Asembler PIC16F84A. Hola veguepic, voy a aclararte el tema del Carry, porque probablemente te surjan problemas futuros si lo utilizas asi.Si vos queres realizar una Rotacion hacia la Izquierda o la Derecha, y asegurarte que el bit que ingrese(es decir, el valor de STATUS,C) valga cero,es NECESARIO limpiar el carry inmediatamente antes de CADA UNA de las instrucciones RLF o RRF.Si te fijas en tu ultimo programa, por ejemplo, tenes instrucciones como la ADDWF, o las mismísimas RLF y RRF, etc que afectan al Carry.
Un ej(trozo de codigo del ultimo programa ejemplo que publicaste): GeSHi (asm): Ejemplos en Asembler PIC16F84A. Hola veguepic, voy a aclararte el tema del Carry, porque probablemente te surjan problemas futuros si lo utilizas asi.Si vos queres realizar una Rotacion hacia la Izquierda o la Derecha, y asegurarte que el bit que ingrese(es decir, el valor de STATUS,C) valga cero,es NECESARIO limpiar el carry inmediatamente antes de CADA UNA de las instrucciones RLF o RRF.Si te fijas en tu ultimo programa, por ejemplo, tenes instrucciones como la ADDWF, o las mismísimas RLF y RRF, etc que afectan al Carry.