
Aircraft principal axes. The position of all three axes An aircraft in flight is free to rotate in three dimensions: pitch, nose up or down about an axis running from wing to wing, yaw, nose left or right about an axis running up and down; and roll, rotation about an axis running from nose to tail.
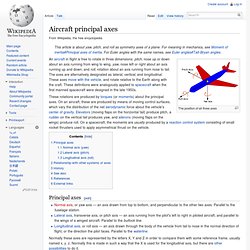
The axes are alternatively designated as lateral, vertical, and longitudinal. These axes move with the vehicle, and rotate relative to the Earth along with the craft. These definitions were analogously applied to spacecraft when the first manned spacecraft were designed in the late 1950s. Principal axes[edit] Normal axis, or yaw axis — an axis drawn from top to bottom, and perpendicular to the other two axes. Normally these axes are represented by the letters X, Y and Z in order to compare them with some reference frame, usually named x, y, z. Normal axis (yaw)[edit] Yaw Yaw axis is a vertical axis through an aircraft, rocket, or similar body, about which the body yaws; it may be a body, wind, or stability axis. Pitch. Euler angles. Euler angles represent a sequence of three elemental rotations, i.e. rotations about the axes of a coordinate system.
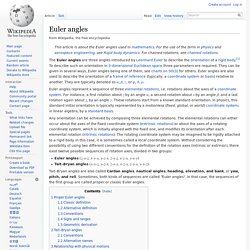
For instance, a first rotation about z by an angle α, a second rotation about x by an angle β, and a last rotation again about z, by an angle γ. These rotations start from a known standard orientation. In physics, this standard initial orientation is typically represented by a motionless (fixed, global, or world) coordinate system; in linear algebra, by a standard basis. Any orientation can be achieved by composing three elemental rotations. The elemental rotations can either occur about the axes of the fixed coordinate system (extrinsic rotations) or about the axes of a rotating coordinate system, which is initially aligned with the fixed one, and modifies its orientation after each elemental rotation (intrinsic rotations). Moving frame. In mathematics, a moving frame is a flexible generalization of the notion of an ordered basis of a vector space often used to study the extrinsic differential geometry of smooth manifolds embedded in a homogeneous space.
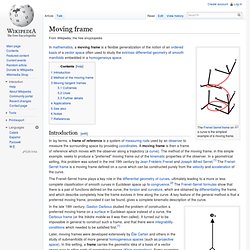
Introduction[edit] In lay terms, a frame of reference is a system of measuring rods used by an observer to measure the surrounding space by providing coordinates. A moving frame is then a frame of reference which moves with the observer along a trajectory (a curve). The method of the moving frame, in this simple example, seeks to produce a "preferred" moving frame out of the kinematic properties of the observer. In a geometrical setting, this problem was solved in the mid 19th century by Jean Frédéric Frenet and Joseph Alfred Serret.[1] The Frenet-Serret frame is a moving frame defined on a curve which can be constructed purely from the velocity and acceleration of the curve. In each of these examples, the collection of all frames is homogeneous in a certain sense.
Neural Networks.