
Drone laws: What are the rules of owning, flying and shooting down drones in the UK? Drones have been causing chaos at London's Gatwick airport, with thousands of passengers left stranded after flights were suspended when drones were spotted flying near the airfield.
It isn't the first time drones have been reported at Gatwick airport. In July, a drone passing over the right wing of an Airbus A319 "put 130 lives at risk", according to the pilot, while the British Airline Pilots Association recorded 117 near misses between aircraft and drones throughout the UK between January and November this year. Knowingly or not, the operators of these drones were in violation of rule number one of the Civil Aviation Authority's Drone Code: "Don't fly near airports or airfields. " We’ll tell you what’s true. You can form your own view. No 100% power on engines - Help - DroneTrest. Hello everyone!

Why are motors not getting full power from arducopter. Arducopter is limiting the total power output of my hexacopter to 37 amps when it has the potential for 66amps when at full throttle.
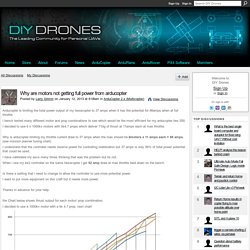
I bench tested many different motor and prop combinations to see which would be the most efficient for my arducopter hex 550. I decided to use 6 x 1000kv motors with 9x4.7 props which deliver 710g of thrust at 11amps each at max throttle. Why is arducopter limiting my throttle current draw to 37 amps when the max should be 6motors x 11 amps each = 66 amps. Introducing Copter — Copter documentation. Copter is an advanced open-source autopilot system for multicopters, helicopters, and other rotor vehicles.
It offers a wide variety of flight modes from fully manual to fully autonomous. As part of the wider ArduPilot software platform it works seamlessly with a variety of Ground Control Station programs that are used to setup the vehicle, monitor the vehicle’s flight in real-time and perform powerful mission planning activities. It also benefits from other parts of the Ardupilot ecosystem, including simulators, log analysis tools, and higher level APIs for vehicle control. ArduPilot is already a preferred platform for numerous commercially available autopilot systems but you can also use it to enhance the abilities of your own DIY multirotor.
Key features¶ Key features include: High precision acrobatic mode: perform agressive maneuvers including flips! Getting started¶ The first thing that you will need is a multicopter with an ArduPilot compatible flight controller. APM 2.6 RC autopilot mega autopilot - free shipping from UK. Please note that this APM board is manufacturerd by us (Unmanned Tech) and not by 3DR in mexico as they no longer make the APM2.6 boards.
The APM 2.8 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors. This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. ArduPilot Mega - Home. AeroQuad Manual. Though there are not many questions about this and it is not mentioned much until something goes wrong, we feel it is our duty to mention this.
The motors and propellers used here are not something to be joked around with. They are dangerous moving parts that can do some serious cutting and chopping damage if you are not careful. Under no circumstances are you to put the propellers on the motors until everything is checked out and tested to be working properly. This is something that can turn a nice day into something horrible, such as an emergency room visit or worse, so please be aware, and please do all of the testing outside, away from people as well. The authors of this tutorial will not be held responsible for any damage or injury done to or by the user. AeroQuad Shield v2.2. 9DOF ITG3205 ADXL345 HMC5883L Sensor Breakout. 9DOF ITG3205 ADXL345 HMC5883L Sensor Breakout 9 axis module (three-axis gyro + three axis acceleration + three axial magnetic) containing some of the most popular chips.
What also sets this board apart from others is the integrated 3.3V Voltage Regulator and Logic Level Conversion. You can connect this board directly to 5V systems (5V power in to VCC) and the SDA and SCL pins will be at 5V levels, but you can also connect it directly to 3.3V systems (3.3V power in to VCC) and the SDA and SCL pins will be at 3.3V levels. Build A Quadcopter From Scratch - Hardware Overview - Oscar Liang. This article explains the anatomy of a quadcopter, and what each component does in a quadcopter.

This tutorial is an essential part of learning how to build a quadcopter from scratch. If you are planning on building a quadcopter from scratch but not sure where to start, you might find this guide useful. Mini Quad is the most versatile platform for FPV flying IMO, that can be used for racing, free-style flying and even aerial filming. Build A Quadcopter From Scratch - Hardware Overview - Oscar Liang.