
PaulStoffregen/TimerOne: TimerOne Library with optimization and expanded hardware support. Librairies arduino : comment les installer ? Les librairies (bibliothèques en bon français) sont du code qui simplifie l’utilisation d’un capteur, d’une fonctionnalité.

Elles sont chargées dans l’arduino si nécessaire. Nous allons voir ici comment faire concrètement pour les charger. Quand charger une librairie ? Dès qu’un sketch arduino contient une ligne ressemblant à #include "LedControl.h" , il appelle une librairie (ici la bibliothèque LedControl). Lors de la compilation préalable à la programmation de l’arduino, l’interface arduino vérifie que la librairie est bien disponible. Il est donc nécessaire de mettre la librairie à disposition de l’IDE avant de lancer la compilation. utilisation du gestionnaire de librairies Le gestionnaire de librairies permet d’afficher la liste des librairies prêtes à l’emploi ou prêtes à installer.
Pour plus de précisions, voir ce document arduino. Importation d’un fichier zip J’obtiens un fichier nommé « LedControl-master.zip ». Méthode par l’interface arduino méthode manuelle Dans ce cas, Librairies arduino : comment les installer ? Programmerapportcycliquevitesse. Libraries. Once you are comfortable with the Arduino software and using the built-in functions, you may want to extend the ability of your Arduino with additional libraries.
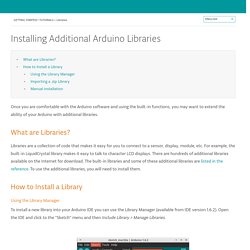
What are Libraries? Libraries are a collection of code that makes it easy for you to connect to a sensor, display, module, etc. For example, the built-in LiquidCrystal library makes it easy to talk to character LCD displays. There are hundreds of additional libraries available on the Internet for download. The built-in libraries and some of these additional libraries are listed in the reference. How to Install a Library Using the Library Manager To install a new library into your Arduino IDE you can use the Library Manager (available from IDE version 1.6.2). Then the Library Manager will open and you will find a list of libraries that are already installed or ready for installation. Finally click on install and wait for the IDE to install the new library. TPhacheur. Vitessearduinoprogramme. Programme arduino commande rapport cyclique.
Gb37y3530-131. 12V DC Motor 251rpm w/Encoder (SKU: FIT0186) - DFRobot Electronic Product Wiki and Tutorial: Arduino and Robot Wiki-DFRobot.com. Tutoriel Arduino : asservissement en vitesse d’un moteur à courant continu – Robotique – Internet des Objets – Cloud. Introduction L’asservissement en vitesse d’un moteur à courant continu est la plupart du temps nécessaire pour les robots mobiles.

On peut éventuellement se satisfaire d’un servomoteur à rotation continu dans le cas de petits robots mais dans un cas plus général (comme pour le robot gyropode Geeros), il sera préférable d’utiliser un moteur à courant continu avec réducteur, associé à un codeur incrémental (pour mesurer la vitesse de rotation). Le calcul de l’asservissement sera réalisé par un Arduino. Nous allons détailler tout ceci dans la suite de cet article. Matériel utilisé Ce tutoriel peut être mis en application facilement avec l’expérience « Commande de moteur électrique ». La carte Romeo est intéressante car elle intègre de façon très compacte le micro-contrôleur (AVR Atmega328, le même cœur qu’un Arduino Uno) et un double pont en H permettant de contrôler deux moteurs à courant continu avec un courant max de 2 A en permanence (jusqu’à 3 A en pic).
Calcul de la vitesse Code complet. Encodeur vitesse programme arduino. Le moteur à courant continu. Commençons en douceur par l’explication de ce à quoi sert un moteur et son fonctionnement.

Ce chapitre n’est pas un des plus simples car il va faire apparaître des notions de mécanique qui sont indispensables pour comprendre le mouvement. Il prend en général plusieurs heures de cours pour être bien expliqué. Nous allons donc vous faire ici uniquement une introduction à la mécanique du moteur. Cependant, cette introduction présente des notions très importantes pour bien comprendre la suite, ne la négligez donc pas !
Les sorties "analogiques" - Tuto Arduino - Le blog d'Eskimon. Bon, on est arrivé à modifier les couleurs d’une LED RGB juste avec des « impulsions », plus exactement en utilisant directement le signal PWM.

Mais comment faire si je veux un signal complètement analogique ? C’est justement l’objet de cette sous-partie : créer un signal analogique à partir d’un signal numérique. Cependant, avant de continuer, je tiens à vous informer que l’on va aborder des notions plus profondes en électronique et que vous n’êtes pas obligé de lire cette sous-partie si vous ne vous en sentez pas capable. Revenez plus tard si vous le voulez. Pour ceux qui cela intéresserait vraiment, je ne peux que vous encourager à vous accrocher et éventuellement lire ce chapitre pour mieux comprendre certains points essentiels utilisés dans cette sous-partie.
La valeur moyenne d’un signal Sur une période d’un signal périodique, on peut calculer sa valeur moyenne. Le signal carré Reprenons notre signal carré : J’ai modifié un peu l’image pour vous faire apparaitre les temps. Explications.