
Moteur pas-à-pas piloté par GPIO du Raspberry Pi. Pour ceux qui seraient intéressés, voici comment j’ai procédé Théorie sur les moteurs pas à pas Piloter un moteur pas à pas (via un CI L293D) avec une Arduino Programme Arduino Théorie du GPIO de la Raspberry Pi Assemblage de LEDs pilotées par la Raspberry Allumer 4 LEDs avec un script en Python Utilisation de la bibliothèque WiringPi en C Programmation du pilote en C Théorie sur les moteurs pas à pas Pour cette expérience, j’ai utilisé un moteur pas à pas bipolaire (4 fils).
Ce type de configuration impose de pouvoir changer le sens du courant au niveau du système d’alimentation. Pour faire avancer le moteur, il faudra donc réaliser les séquences suivantes : En gris, les pôles ne sont pas alimentés ; en noir les pôles alimentés attirent le rotor de pas en pas pour effectuer un tour complet. Piloter un moteur pas à pas (via un CI L293D) avec une Arduino pas serait le bras musclé tandis que le pilotage devra se faire depuis le cerveau (dans notre cas l’Arduino puis le Raspberry pi).
Sudo python. Robot RAPIRO : un petit assistant programmable Raspberry Pi. Proposé sur Kickstarter, RAPIRO est un adorable petit assistant humanoïde mécanique conçu pour fonctionner avec un Raspberry Pi et doté d’un servo-contrôleur compatible Arduino.

Fonctionnant avec quatre piles AA ou à l’aide d’une batterie Li-Po 18650, le RAPIRO est équipé de deux ports USB, d’un port Ethernet, de LEDs RVB pour les yeux ainsi que de 12 servomoteurs. Capable de saisir des objets, de tourner la tête et le torse mais aussi de se déplacer, ses créateurs espèrent en faire bien plus qu’un jouet et lui ont d’ores et déjà ajouté la capacité de se connecter en Wi-Fi afin qu’il puisse recevoir des notifications (mail, Twitter, Facebook …etc.). Bien entendu, vous aurez deviné que le principal intérêt du RAPIRO réside dans la possibilité de le programmer vous-même afin qu’il intègre de nouvelles fonctionnalités (son créateur explique d’ailleurs comment ajouter une caméra à celui-ci).
Un robot Raspberry pour 100-120€ Partie 1/5. Un robot Raspberry pour 100-120€ Partie 1/5 Description: Je vous propose un prototype de robot Raspberry Pi aux alentours d’une centaine d’euros (disons jusqu’à 120) tout compris.
Ce tutoriel est fait pour que quelqu’un n’ayant aucune base puisse faire son robot, et le faire fonctionner. Un robot Raspberry à conduite différentielle – Partie 1/5 : Introduction et présentation du robot Ce robot utilise deux moteurs DC (à courant continu) commandés par des L293D interfacés au Pi par un MCP23017. Un MCP3008 permet de lire les entrées d’un capteur ultrasonique Maxbotix LV-EZ4. Le principe général Ce robot possède deux roues parallèles, entraînées chacune par un moteur électrique DC. Il y a 5 batteries dans un compartiment pouvant en accepter 6.
Le capteur ultrasonique est placé sur la face avant du robot, et indique la distance aux obstacles se situant dans l’arc frontal. Liste du matériel En pratique, on s’en sort pour 80 à 120€, selon les options, si l’on a déjà des batteries, etc. ROBOT Raspberry ZUMO. ROBOT « Raspberry Zumo » by Frédéric JELMONI Galerie photos >>> Présentation. 2 Liste des pièces mécaniques et électroniques. 3 Présentation rapide de carte Raspberry PI 5 Configuration de la Raspberry. 6 Gestion de la webcam et du flux video. 9 Schéma électronique. 10 Programmation. 12 Ce petit robot a été réalisé à l’aide d’une carte « Raspberry PI », d’un châssis à chenille de chez « Pololu », et d’une webcam.
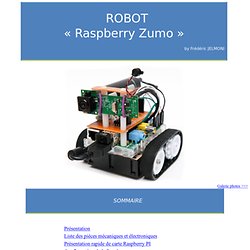
Sa connexion Wifi lui permet de diffuser les flux vidéo sur le réseau et d’être commandé à distance de façon très simple, depuis un ordinateur ou éventuellement un smartphone type Iphone ou Andoid. Je vous propose de décrire, en quelques lignes, les différentes étapes de cette réalisation ; les aspects mécaniques, électroniques et informatiques. <<< Galerie photos >>> Voici la liste des pièces utilisées lors de la réalisation du robot : Ø Le chassis « Zumo » de chez Pololu.com Ø Deux moteurs 6volt de chez Pololu.com Ø Une carte Raspberry PI 512Mo Modèle B Dispo chez : Ø Une carte SD de 8Go Puis :