
NVIDIA/nvidia-docker: Build and run Docker containers leveraging NVIDIA GPUs. Craymichael/ros-kinetic-nvidia-docker: ROS Kinetic desktop-full Docker image that works with nvidia-docker2 (and CUDA) [PDF] ReconstructMe SDK: a C API for Real-time 3D Scanning. Handheld 3D scanning with 3D Systems – Intel® RealSense™ Depth and Tracking Cameras. There are many different applications for 3D scanning, and many different approaches and solutions, depending on things like the environment you want to scan in, the size of the object, the material or type of object or scene, the end use and desired output.
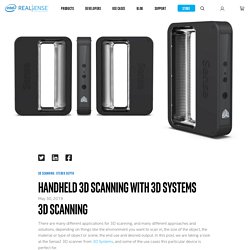
In this post, we are taking a look at the Sense2 3D scanner from 3D Systems, and some of the use cases this particular device is perfect for. The Sense2 The Sense2 3D scanner is the next generation of handheld scanners from 3D Systems. It contains an integrated Intel® RealSense™ SR300 module, enabling short range scanning combined with RGB texture data. While many other 3D scanning systems require specific large scale setups, or need a high powered PC to process the scan data, the SR300 in the Sense performs all the depth calculations on the device, allowing the Sense software to run just as effectively on a tablet as it does as a large PC. Enriching lives Object scanning Learn more about the Sense 2 here. Simple Digit Recognition OCR in OpenCV-Python. Tmbdev/clstm: A small C++ implementation of LSTM networks, focused on OCR. Tesseract-ocr/tesseract: Tesseract Open Source OCR Engine (main repository)
Scene Text Recognition. #include <opencv2/text/ocr.hpp> Allow to implicitly load the default character classifier when creating an OCRHMMDecoder object.
Parameters The KNN default classifier is based in the scene text recognition method proposed by Lukás Neumann & Jiri Matas in [Neumann11b]. Basically, the region (contour) in the input image is normalized to a fixed size, while retaining the centroid and aspect ratio, in order to extract a feature vector based on gradient orientations along the chain-code of its perimeter. Then, the region is classified using a KNN model trained with synthetic data of rendered characters with different standard font types. Windows Command Line. How to Install PIP For Python on Windows. Comment installer Pip pour Python sur Windows ? - WayToLearnX. Pip est l’un des meilleurs outils pour installer et gérer les packages Python.

Pip a acquis sa renommée par le nombre d’applications utilisant cet outil. Utilisé pour ses capacités à gérer des packages binaires, Pip permet d’installer des packages tiers. Bien que les dernières versions de Python soient livrées avec pip installé par défaut, ce tutoriel montrera comment installer Pip, vérifier sa version et montre quelques commandes de base pour son utilisation. Prérequis: Avant de pouvoir installer Pip sur votre Windows, vous devez confirmer que Python est installé. La façon la plus simple de tester l’installation de Python sur votre Windows est d’ouvrir l’invite de commande (cliquez sur l’icône Windows et tapez cmd, puis cliquez sur l’icône de l’invite de commande). Une fois la fenêtre d’invite de commandes s’ouvre, tapez python et appuyez sur Entrée.
Si Python est installé correctement, vous devriez voir une sortie similaire à ce qui est montré ci-dessous: Si vous recevez un message comme: When will be 3D scan sdk for d435 camera will be released? – Intel RealSense Help Center. Plans & Pricing. Pick a plan and start your 3D scanning experience today.
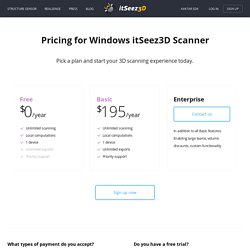
Free $0/year Unlimited scanning Local computations 1 device Unlimited exports Priority support Basic $195/year. RealSense™ SDK 2016 R2 Documentation. RoViL-Team/rxkinfu: Kinect Fusion for Robotics, Perception, Etc. (RXKinFu) Mp3guy/ICPCUDA: Super fast implementation of ICP in CUDA for compute capable devices 3.5 or higher. InertialNavigation. Interfacing Intel Real Sense camera with ROS - Mastering ROS for Robotics Programming - Second Edition. TensorFlow. Docker uses containers to create virtual environments that isolate a TensorFlow installation from the rest of the system.
TensorFlow programs are run within this virtual environment that can share resources with its host machine (access directories, use the GPU, connect to the Internet, etc.). The TensorFlow Docker images are tested for each release. Docker is the easiest way to enable TensorFlow GPU support on Linux since only the NVIDIA® GPU driver is required on the host machine (the NVIDIA® CUDA® Toolkit does not need to be installed). TensorFlow Docker requirements. CUDA + Docker = ❤️ for Deep Learning - Aditya Thiruvengadam - Medium. I’m hoping you are using a docker-compose file to build and run your containers.
It is remarkably cleaner than running docker commands with flags all over the place. Setting NVIDIA runtime: Docker – Configurer l’utilisation du GPU NVidia – JBNet.fr. Cuda - Using GPU from a docker container? Celantur. Introductory Level of SLAM Seminar.