
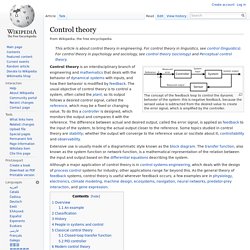
User:Antonis - SYSOS. SBI Rostock: Home. Control theory. The concept of the feedback loop to control the dynamic behavior of the system: this is negative feedback, because the sensed value is subtracted from the desired value to create the error signal, which is amplified by the controller.
Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system. Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs; a few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, and gene expression.
Overview[edit]