
RI 16-662: Robot Autonomy. Instructor: Siddhartha Srinivasa (siddh "addressed at" cs.cmu.edu) TAs: Jen King (jeking "addressed at" andrew.cmu.edu) Matt Klingensmith (mklingen "addressed at" andrew.cmu.edu) Lectures: Mon and Wed, 3:00-4:20, GHC 4215 Office hours: Wed 1:30 - 3:00, NSH 4502 (Personal Robotics Lab) Announcements: CMU Blackboard Description Robot autonomy delves into the interplay between perception, manipulation, navigation, and learning required to develop fully autonomous systems.
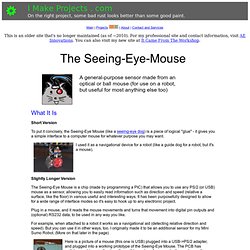
We will focus on application domains like the home, retail, and healthcare and identify common themes and key bottlenecks. About this document ... I Make Projects - The Seeing-Eye Mouse Project. The Seeing-Eye-Mouse.
Autonomous Robots Blog. Dallas Personal Robotics Group. CCNY Robotics Lab. Prof.
Dr. Jianwei Zhang Director, Institute TAMS (Technical Aspects of Multimodal Systems) Department of Informatics, University of Hamburg, Date: March 5, 2013Time: 2:00 pm - 3:00 pmLocation: NAC-8/207 (CS Conference Room) In a dynamic and changing world, a robust and effective robot system must have adaptive behaviors, incrementally learnable skills and a high-level conceptual understanding of the world it inhabits. I will first show several developed platforms of intelligent service robot systems, e.g. in medical assistance, rehabilitation, home service, and edutainment, etc. Jianwei Zhang is professor and head of TAMS, Department of Informatics, University of Hamburg, Germany. The DREAM Lab. Fei.edu.br/~murilo/rosfei/ROS_Intro_Day1_handout.pdf. SIGCSE 2012 workshop on ROS in Undergraduate Education. Overview.
Dual H-Bridge Motor Driver - GOF_Wiki Dual H-Bridge Motor Driver - Open Source,Open Minded. From GOF_Wiki Introduction This Dual H-Bridge Motor Driver Shield, which based on H-bridge driver Chip L298N Motor Driver Integrated Circuit, is a usefull module for controlling of robotics and mechanics.
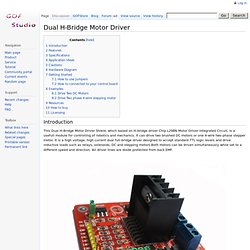
It can drive two brushed DC motors or one 4-wire two-phase stepper motor. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors.Both motors can be driven simultaneously while set to a different speed and direction. All driver lines are diode protected from back EMF. Features Light weight, small dimension Super driver capacity FWD protection Heavy load Heat sink Power selection switch 4 pull up resistor switch 2 DC motor/ 4 coil dual phrase stepper motor output Motor direction indication LED5V power indication LED 4 standard mouting holes Specifications Application Ideas drive brushed DC motors drive 4-wire two-phase stepper motor.
Natural Robotics Lab, The University of Sheffield. In social insect colonies, many tasks are performed by higher-order group or team entities, whose task solving capacities transcend those of the individual participants.
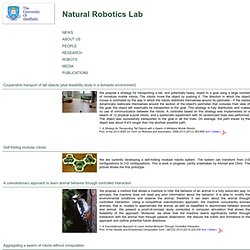
In this paper, we investigate the emergence of such higher-order entities. We report on an experimental study in which a team of physical robots performs a foraging task. The robots are ``identical'' in hardware and control. Robots Dreams: I've tended to think of robot motion in terms of a Cartesian coordinate system - straight lines and 90 degree turns.

The micromouse 'maze', with its 16x16 array of cells, plays right into this way of thinking. Each cell in the maze comes neatly packaged with right angles and perfect dimensional order. It's easy to represent in the computer's memory as well by mapping each cell in the maze to a corresponding array cell in memory. This leads us to think of traveling through the maze as a serial process - cell by cell. Enter a new cell, figure out where the walls are, figure out where to go next, then move on. Yet the top competitors seem to have approached the problem a little differently. They appear to be committing to turns before they are completely into a cell (see conceptual drawing above.) One approach that might allow them to achieve that kind of speed is to sense the presence, or absence, of walls in the next cell before they get there.
Pi Robot. In the previous tutorial we learned how to use ROS and OpenCV to do basic head tracking of a visual target as seen in a typical webam.
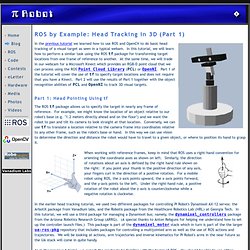
In this tutorial, we will learn how to perform a similar task using the ROS tf package for transforming target locations from one frame of reference to another. At the same time, we will trade in our webcam for a Microsoft Kinect which provides an RGB-D point cloud that we can process using the ROS Point Cloud Library (PCL) or OpenNI. Part 1 of the tutorial will cover the use of tf to specify target locations and does not require that you have a Kinect. Part 2 will use the results of Part 1 together with the object recognition abilities of PCL and OpenNI to track 3D visual targets. Part 1: Head Pointing Using tf The ROS tf package allows us to specify the target in nearly any frame of reference. Course material Robotics 2.
CompilingEasyHowTo. Let's say you are a moderately experienced Linux user, and you want to install an application off the Internet but it doesn't have a nice package that works on your system.

(If it does have a package, install it following the instructions on InstallingSoftware.) A lot of users, even quite experienced ones, have issues with going from the tarball to the installed program because they just do not know the fairly easy steps required to get the job done. But it's only easy if you already know how to do it! So, here's a quick guide about how to install stuff from developer sites.
Step 1: Prep your system for building packages By default, Ubuntu does not come with the tools required. Sudo apt-get install build-essential checkinstall And since you may want to get code from some projects with no released version, you should install appropriate version management software. sudo apt-get install cvs subversion git-core mercurial sudo chown $USER /usr/local/src and, just to be safe autogen.sh make.