
Harvard Biodesign Lab. Multi-material fluidic actuators Soft fluidic actuators consisting of elastomeric matrices with embedded flexible materials (e.g. cloth, paper, fiber, particles) are of particular interest to the robotics community because they are lightweight, affordable and easily customized to a given application.

These actuators can be rapidly fabricated in a multi-step molding process and can achieve combinations of contraction, extension, bending and twisting with simple control inputs such as pressurized fluid. In our approach is to use new design concepts, fabrication approaches and soft materials to improve the performance of these actuators compared to existing designs. In particular, we use motivating applications (e.g. heart assist devices, soft robotic gloves) to define motion and force profile requirements. We can then embed mechanical intelligence into these soft actuators to achieve these performance requirements with simple control inputs. Am207. Variable Impedance Actuators. The R&MM research group has many years of experience with the development, design and control of Variable Impedance Actuators or VIAs.

The following compliant actuators are developed in-house: Soft Robotics Toolkit. When designing multi-segment compliant fingers with shape deposition manufacturing, deterministic tools should be sought to ensure that relevant design criteria are met (for example, finger stroke or transmission ratio).
Finite element simulations can be employed for this task. However, the behavior can also adequately be described using first principles and beam theory. Please read this document for a detailed description and derivation of the analytical model. WebGerber. 3D Gerber Viewer. With this viewer you can upload your Gerber files and have a 360 degree view of your PCB design.
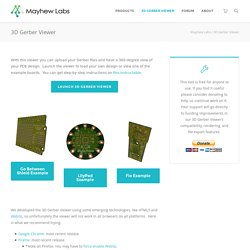
Launch the viewer to load your own design or view one of the example boards. You can get step-by-step instructions on this Instructable. Launch 3D Gerber Viewer. Web.mit.edu/nsl/www/videos/lectures.html. HOW TO GET WHAT YOU WANT. Use of a circular knitting machine to knit a circular stretch sensor from combinations of conductive and non-conductive yarns.
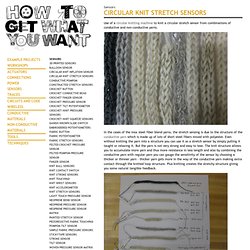
In the cases of the Inox steel fiber blend yarns, the stretch sensing is due to the structure of the conductive yarn which is made up of lots of short steel fibers mixed with polyester. Even without knitting the yarn into a structure you can use it as a stretch sensor by simply pulling it taught or relaxing it. But the yarn is not very strong and easy to tear. The knit structure allows you to accumulate more yarn and thus more resistance in less length and also by combining the conductive yarn with regular yarn you can gauge the sensitivity of the sensor by choosing a thicker or thinner yarn – thicker yarn gets more in the way of the conductive yarn making extra contact through the knitted loop structure.
Plus knitting creates the stretchy structure giving you some natural tangible feedback. Videos Conductive yarn Circular knitting machines. Renaud Detry - Grasping Using Tactile And Visual Data. Advanced Design Patterns in Python. The aim of this tutorial is to show off Advanced design structures in Python and the best way to use them.

Depending on what you need from a data structure, whether it’s fast lookup, immutability, indexing, etc, you can choose the best data structure for the job and most of the time, you will be combining data structures together to get a logical and easy to understand data model. Python data structures are very intuitive from a syntax point of view and they offer a large choice of operations. This tutorial tries to put together the most common and useful information about each data structure and offer a guide on when it is best to use one structure or another.
Comprehensions. CITIES Innovation Studio. Shaping Resistive Bend Sensors to Enhance Readout Linearity. The How To Guide For Organizing a Successful Hackathon For Social Good. Hackathons are a great way to get developers and other creative people together and working on building ideas into web and mobile applications.

Imagine if this creative energy could be channeled to further your social mission. Many big companies like Google, Facebook and LinkedIn organize regular hackdays within their companies to give people an opportunity to come up with new ideas that help their users. Kile - an Integrated LaTeX Environment. GraspIt! For an introduction to GraspIt!
, the most complete overview of its core features is in: * Andrew Miller and Peter K. Mindsets online - QTC Pill (Quantum Tunnelling composite) - Heat/Voltage Reactive. Download or View the Design and Technology edition of Product News.

Download or View the Special Science edition of Product News. STM32F4DISCOVERY Development with GCC in Eclipse. First of all, I want to thank the OpenOCD Project for its latest release of OpenOCD.
Thanks to this release, its possible to get a working development environment for the STM32F4DISCOVERY relatively fast. For now this post is Ubuntu specific. Setting the Development Enviroment on other platforms should be fairly similar. I'll cover how to install the official GCC build, since it's a newer version. Untar the tarball and that's it, no need to launch a installer. Note: Ubuntu 12.10 users, use the command line tar instead of the GUI archive manager. Do not use the GUI archive manager Use the following command instead: A “live” data monitor with Python, PyQt and PySerial. The previous couple of posts about the PySerial module for serial communications with Python were just a basic introduction. Let's now see something much more useful.
PySerial makes Python a great tool for serial communications from a computer, as it can be easily combined with other powerful Python libraries to create full-scale applications. In my case, I'm using PyQt with its plotting supplementary PyQwt to create nice "live" plotting applications, that can be combined with the serial port. Here's a demo: Download plotting_data_monitor- it's a small demo application written in Python that requires the following modules to be installed on your machine: Android Adventures, part 6: Building a signed .apk from Processing. Go to part 5…, part 7… Processing makes it really easy to “Present” a sketch to your Android phone via it’s “Present” button.
Cite This For Me - Cite a Website in Harvard, MLA, or APA style.
Robotics. Computer Vision] Kinect. ROS. GLSL Sandbox Gallery. Postprocessing. DeveloperStation.ORG. Ocw.mit.edu/courses/mechanical-engineering/2-141-modeling-and-simulation-of-dynamic-systems-fall-2006/lecture-notes/interaction_cont.pdf. DISAL. EE148-main. DisCODe: DisCODe. This project contains sources of DisCODe - a framework facilitating the development of sensor data processing algorithms.DisCODE is written mostly in C++ (in an objective manner) and composing of a components library with patterns for their usage. Those patterns impose general implementation method diverse, multistage data processing algorithms. It was important to develop mechanisms which will simplify the process of processing streams (algorithms) creation, enable switching between different tasks during the application work and, moreover, will offer clear method of their parts (components) separation.
In order to create a general management mechanism dealing with any number of components, each of them is encapsulated in a separate dynamic library - SO (Shared Object) in case of the Linux OS and DLL (Dynamic Linked Library) in case of Windows OS. Components are divided into four classes: Main authors: Tomasz KornutaMaciej Stefanczyk. Modeling, Controlling, and Characterizing the Velo Gripper Prototype. Niloy's Publications. CSCE 990: Robotics Today. Instructor. Lab 4/Final Challenge: Ball Detecting and Retrieval. CSCE 496/896: RoboticsLab 4/Final Challenge: Ball Detecting and RetrievalInstructor: Carrick Detweiler carrick _at_ cse.unl.edu University of Nebraska-Lincoln Spring 2011 Started: November 4, 2011 Checkpoint: November 18, 2011 Due Date: December 9, 2011.
Homes.cs.washington.edu/~pedrod/papers/cacm12.pdf. Using the Wii Motion Plus (Gyro) and Nunchuck (Accelerometer) with the Propeller. Some Fun Extras. 2.4G Wireless Nunchuck Controller for Wii - White + Black. Para habilitar los descuentos por volumen en este sitio, utilice el código de cupón: BULKRATE durante el pago. Verá aparecer un descuento aplicado en la parte inferior de la cesta de la compra. Precios competitivos disponibles. Póngase en contacto con nosotros para más detalles. ¿Qué es el Bulk Rate? BulkRate es un sistema semi-mayorista con artículos con precios separados de la venta al por menor. ¿Quiere obtener aún más? O contacte directamente con nosotros.